5 Eksenli Robot Kol Yapımı

5 Eksen Robot Kol Stajyer Blog

5 Eksen Robot Kol Stajyer Blog

5 Eksen Robot Kol Stajyer Blog

5 Eksen Robot Kol Stajyer Blog

5 Eksen Robot Kol Projesi Youtube

5 Eksenli Robot Kol 5 Axis Robot Arm Youtube

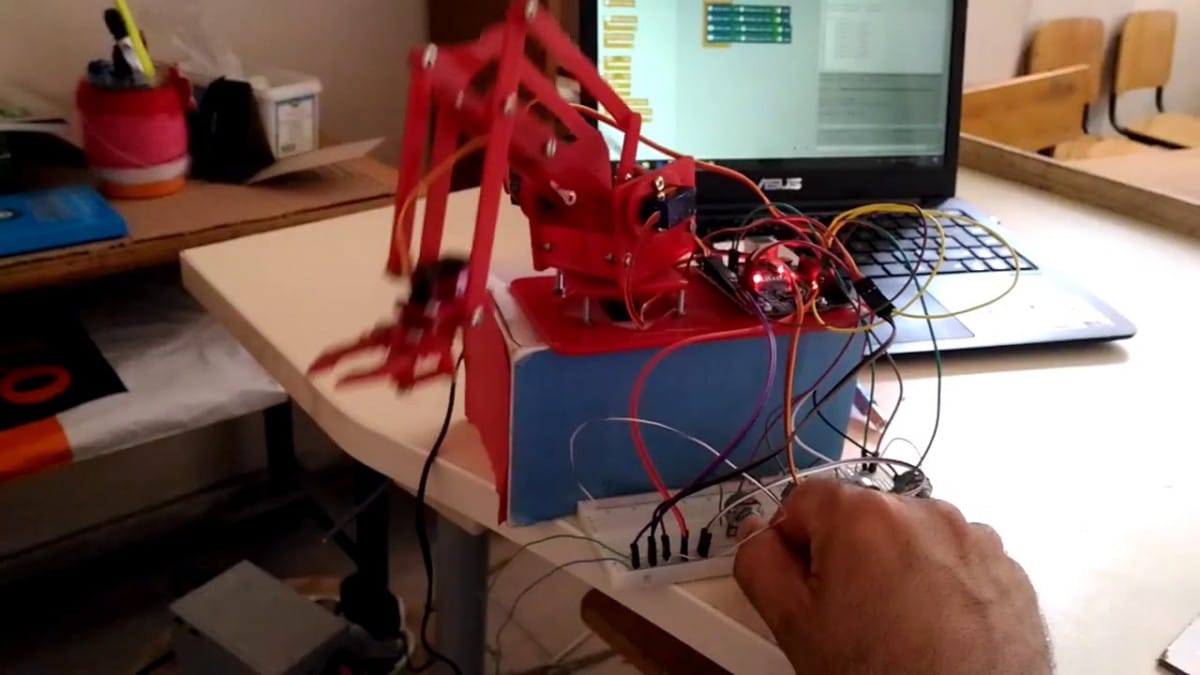
Bu projede el hareketimizle robot kol kontrolünden bahsedeceğim günümüzde robot kollar birçok alanda kullanılmakta özellikle hassasiyet gerektiren uygulamalar tehlike arz eden mekanlarda sıkça kullanılmaktadır tabikide robot kolun kontrol edilmesinde birçok yöntem var fakat her yöntem aynı hassasiyeti göstermiyor bu proje de ivme ölçer kullanarak kontrol edeceğiz.
5 eksenli robot kol yapımı. Nema 17 lerden birisi 60mm uzunluğunda birisi 40mm 5 1 redüktörlüydü. Uşak üniversitesi makine mühendisliği bölümü bitirme projesi 5 eksen robot kol danışman. Eksen kontrolleri için 3d printer kontrol kartı olan ve yaygın olarak kullanılan ramps kartının v1 4 modelini kullandık. Arduino projeleri 4 eksen robot kol yapımı endüstri 4 0 ile birlikte sanayiden insan faktörünü kaldırıp tamamen robot teknolojisi üzerine yoğunlaşma söz konusu.
5 eksenli robot kol ürün videosu 5 eksenli robot kol için ürünün çalışma şeklini gösterir. Robot kolumuzda 2 adet nema 23 2 adet nema 17 1 adet nema 14 ve 1 adet de servo motor kullanıldı.
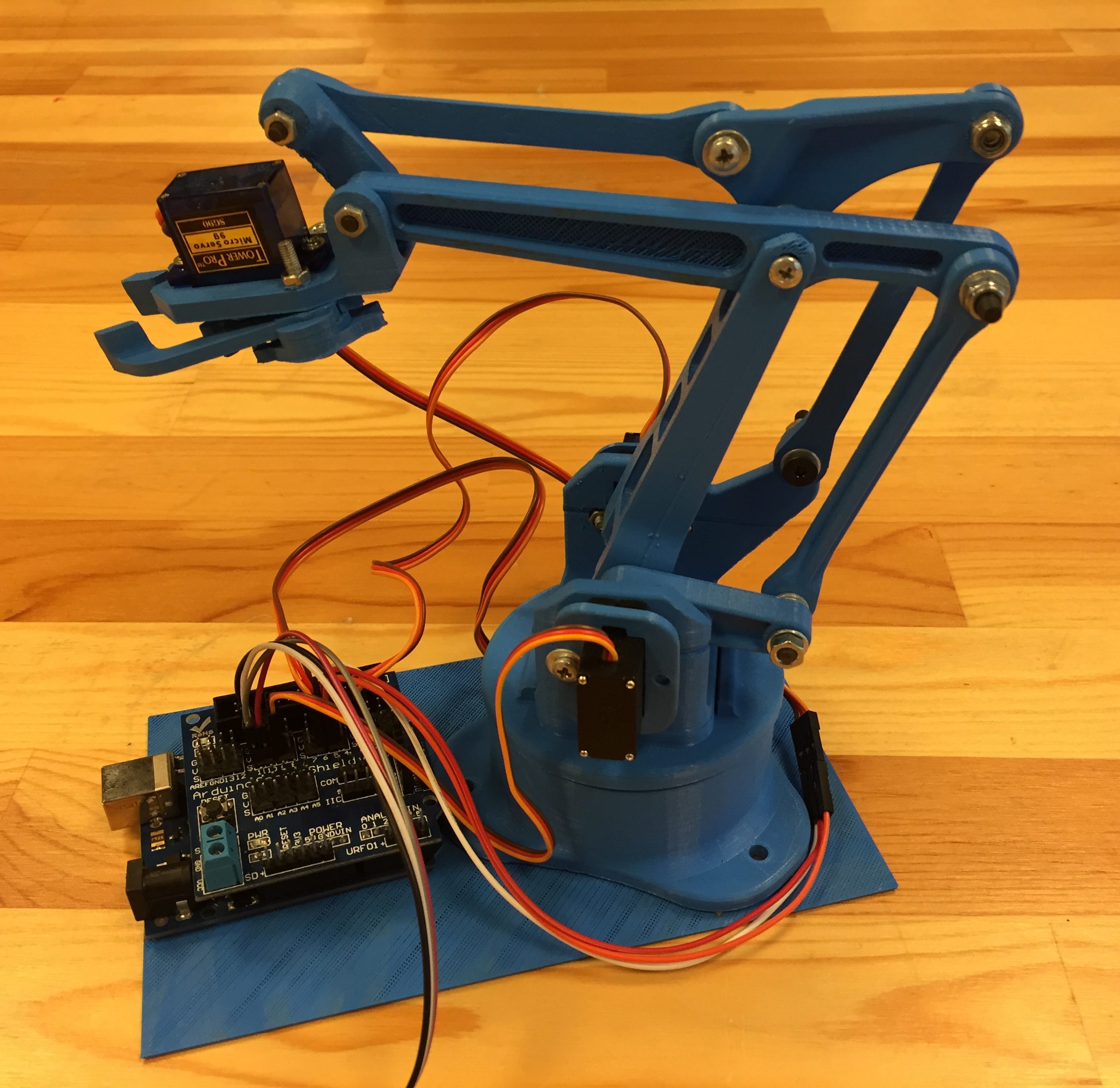
3 Boyutlu Akilli Arduino Robot Kol Yapimi

Basit Robot Yapimi Nasil Yapilir Robot Kol Bolum 1 2 Youtube
5 Eksenli Robot Kol Yapimi Iz Atolye Egitim Cozumleri

3 Boyutlu Akilli Arduino Robot Kol Yapimi

El Hareketiyle Kontrol Edilen 5 Eksen Robot Kol

Ogrenme Fonksiyonuna Sahip Hareket Kopyalayan Robot Kol Yapimi

Akilli Telefon Kontrolu Ile Diy Arduino Robot Kol Yapimi Iz Atolye

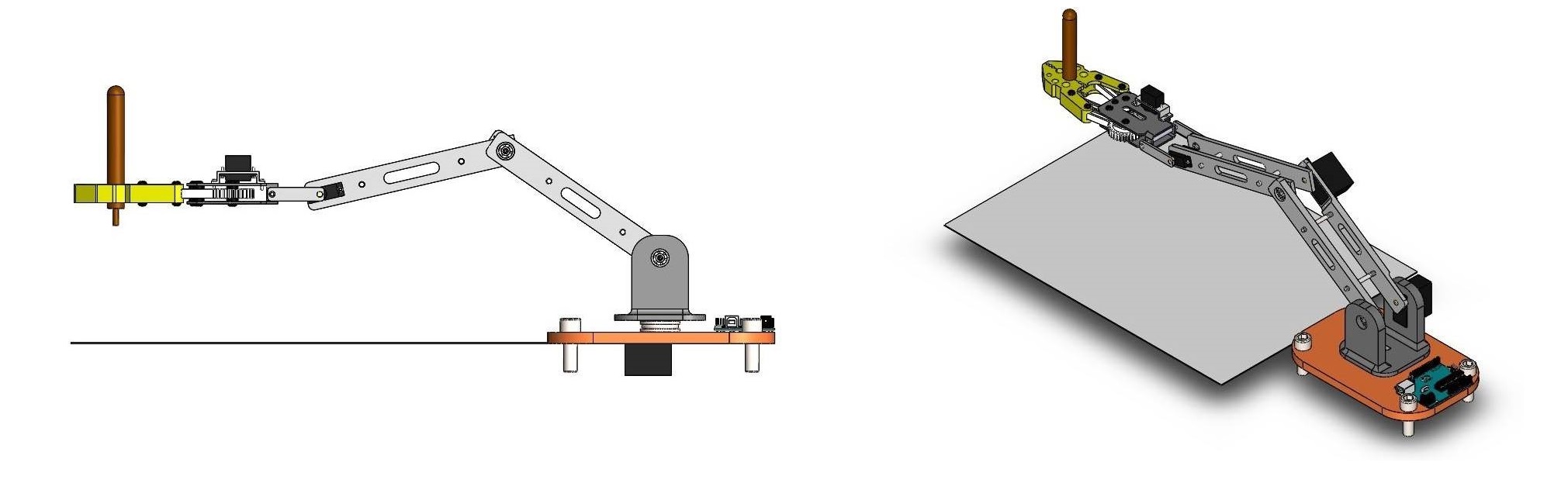
3d Yazicidan Robot Kol Yapimi Proje Hocam
Https Pdfs Semanticscholar Org B704 72b0a3f06549bf464bf9e14bd250e2a39680 Pdf

3d Yazicidan Robot Kol Yapimi Proje Hocam

5 Eksenli Robot Kol Urun Gosterimi Youtube

Zortrax Robot Kol Proje Hocam

Robot Kol Makine Arsivi
4 1 Eksenli Yazici Robot Kolu Tasarimi Roboturka Com

Pleksiglas Robot Kol Plastik Parcalari Ucuz Fiyata Al Robocombo
